Mecabot Explorador 2.0 ’08
Datos Técnicos
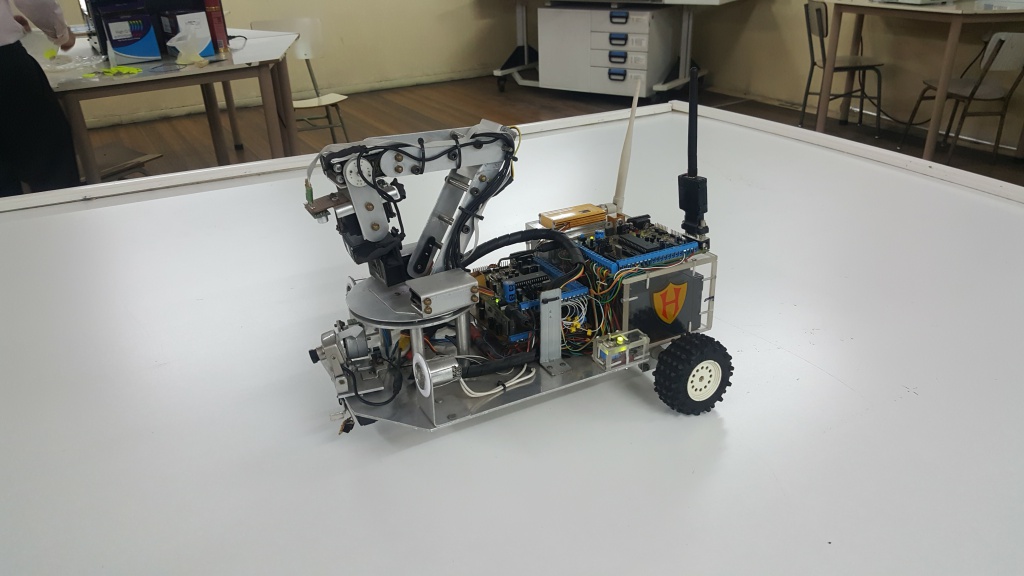
El robot explorador es una evolución del desarrollo del año 2007, si bien se construyó desde cero un nuevo robot, se mantuvieron características similares. Se controla vía inalámbrica a través del protocolo bluetooth, muy utilizado hoy en día en telefonía celular. El mismo posee una cámara de video que envía el audio y video del lugar explorado a una PC, de manera que siempre se tiene imagen y sonido del sitio donde se encuentra el robot que permite guiarlo sorteando obstáculos sin inconvenientes.
Dicha cámara, se puede mover en forma horizontal y vertical a través de dos servomotores y en caso de ser necesario iluminar el sector explorado con luz artificial, a través de dos potentes luces a los laterales de la cámara. De esta manera se mejoraron aspectos de las posibilidades de movimientos de la cámara, así como la utilización en lugares de poca luminosidad. También tiene un sensor que mide constantemente la temperatura del ambiente en donde se encuentra y otro, de gas metano, que chequea la cantidad de moléculas de gas metano que hay en un millón de moléculas de aire (p.p.m. partes por millón). Estos datos son enviados a una P.C. (vía bluetooth) y graficados en la pantalla, generando una base de datos, de manera que se puede saber -ingresando a la misma, por fecha, hora, etc.- cuáles fueron los valores de temperatura y p.p.m. de gas en la fecha y hora ingresados, además de ser imprimibles, tanto los gráficos como los datos. Este modelo incorpora un sensor ultrasónico que permite medir la distancia a un objeto.
Para su desplazamiento cuenta con dos motoreductores de corriente continua, que permiten que se mueva en todos los sentidos. En su parte delantera tiene dos sensores ópticos, que a través de un nuevo mecanismo con un servomotor (que reemplaza el que tenía su predecesor con un motor paso a paso) permite que los que sensores suban o bajen permitiendo seguir o no la trayectoria de una línea dibujada en el piso.
El cerebro del robot es un microcontrolador, el cual controla los movimientos del mismo, como así también el envío y recepción de datos desde/hacia la P.C., con un alcance del sistema de 100 mts. aproximadamente. A pesar de que está pensado para que pueda ser utilizado en lugares inaccesibles o peligrosos, puede tener una aplicación hogareña en vigilancia y/o activación de luces, persianas, equipos de refrigeración/calefacción, sistemas de riego, etc.
Este nuevo desarrollo incorpora como novedad un brazo robótico de 6 grados de libertad, que permite la manipulación de objetos y elementos. El brazo es movido por servomotores. Otra nueva característica es la posibilidad de manejo a través de un celular y además el manejo remoto a través de una red o de Internet. También se desarrollo un software con el que el robot es capaz de reconocer de colores, para identificar obstáculos o bien seguir un determinado color.