Mecabot '09 IUR-GN
Datos Técnicos
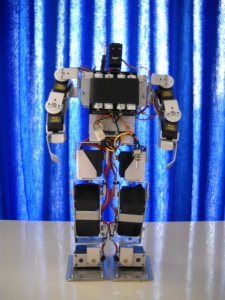
El robot diseñado por los alumnos de Mecatrónica tiene un aspecto humano, imitando la mayoría de las articulaciones, que le permiten realizar infinidad de movimientos, como caminar, bailar y movimientos gimnásticos.
El control del robot puede realizarse a través de un programa que se encuentra en su memoria interna o bien por medio de una comunicación vía bluetooth con una PC, con un alcance aproximado de 100 metros . Es decir, en cuanto al aspecto técnico, el cerebro del robot tiene dos microcontroladores. Uno se encarga del gobierno de los servomotores y el otro del control de la comunicación del humanoide con la PC.
Tiene 17 servomotores, acoplados a través de piezas mecánicas de aluminio, diseñadas, fabricadas y montadas en su totalidad por los alumnos. Este conjunto de piezas conforman las extremidades correspondientes a brazos, piernas y cabeza.
Es necesario manejar los 17 motores en forma simultánea para generar un movimiento coordinado.
Para poder llevar a cabo el proyecto se necesitó la aplicación de herramientas de diseño y programación, tanto en la fabricación de circuitos impresos, como para el desarrollo del software correspondiente.
El software desarrollado en la PC permite visualizar en tiempo real los movimientos del robot, en una simulación 3D, con un entorno de desarrollo XNA de Microsoft.
Está previsto agregarle a futuro una serie de sensores, sistemas de audio y video.
El desafío está planteado.